
Het Robot Project |
 |
Maart 2018:
Een aantal weken geleden repareerde ik een robotstofzuiger. Die robot kon zelf zijn weg terug vinden naar het laadstation. Dat inspireerde mij om zelf een nieuwe robot te bouwen, geen stofzuiger maar wel een die zelf de weg naar het laadstation zou kunnen vinden.
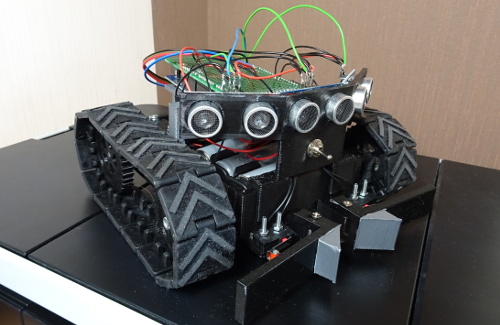
Dit is de robot tot nu toe, het project is nog niet afgerond
Het Schema
Dit is het schema van de robot uit de tweede video.Klik om te vergroten!
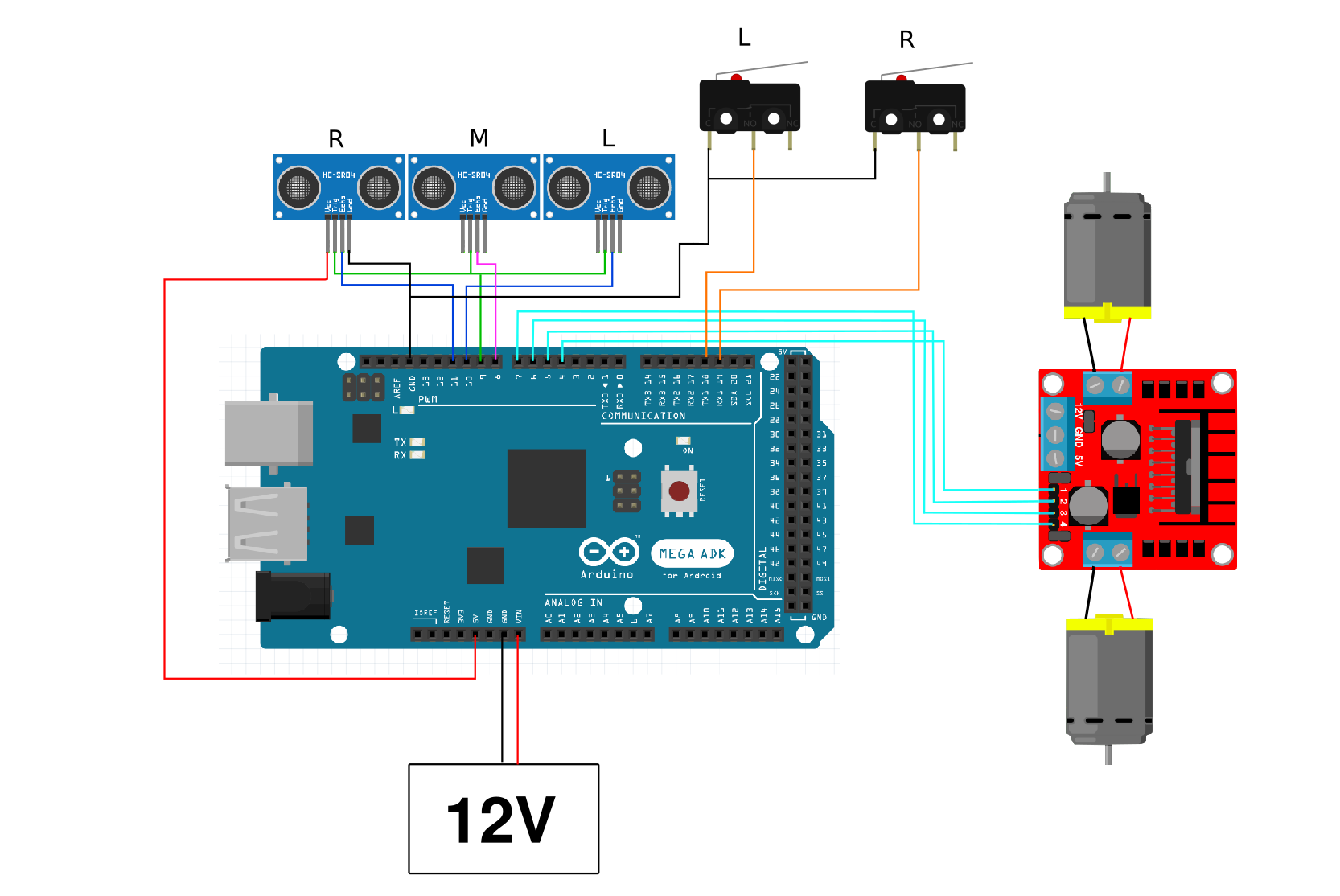
In het schema heb ik niet alle voedingslijnen naar de sensors getekend, die zijn er in het echt natuurlijk wel.
Onderdelen
Arduino Mega
Ik maak gebruik van een Arduino Mega. Die koop je op ebay (in China) of gewoon in Nederland bij opencircuit.nl.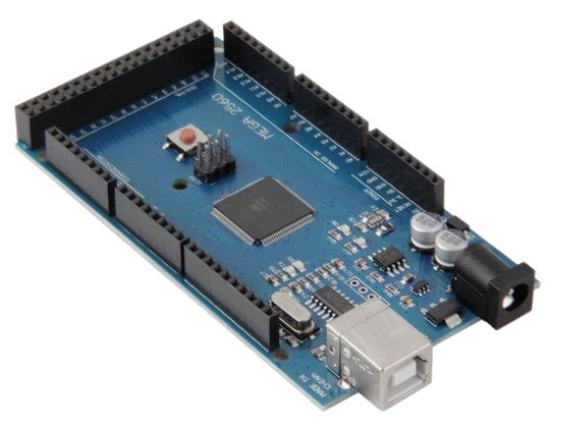
Motor Controller
De kleine motorcontroller uit de eerste video heeft de geest gegeven, dus gebruik ik nu een zwaarder model: L298N motor driver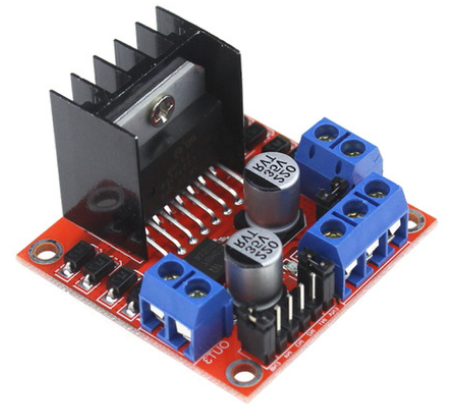
Batterijen en houders
De batterijen zijn 18650 cellen, deze hebben een spanning van bijna 4 volt per stuk. Ik gebruik er 3 in serie om op 12 volt te komen
De batterijhouders zijn 3 losse houders. Ik maak dus geen gebruik van een enkele drievoudige houder, waarom? dat wordt later duidelijk

Sensoren
De robot heeft (tot nu toe) drie ultra sone afstandssensoren.HC-SR04

Micro switches
De bumpers maken gebruik van deze goedkope, kleine, microswitches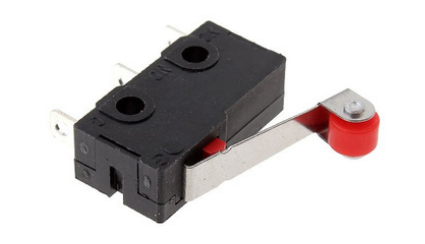
Motors
De motortjes komen van ebay. Ze bestaan in verschillende snelheden, ik gebruik de 100rpm variant.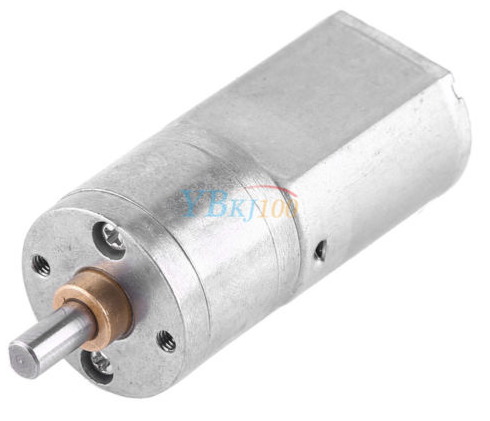
Rupsbanden
De rupsbanden kocht ik op ebay, ze zijn niet altijd goed te vinden dus ik hoop dat deze link werkt
Onderdelen uit de 3d printer
Een aantal onderdelen maal ik zelf met de 3d printer. Ik print alles met PLA, met een nozzel van 0.6mm en een layerhoogte van 0.4 (Zeer grof dus)Hier zijn de stl files zodat je ze zelf kunt printen. Klik op de afbeelding om het onderdeel te downloaden.
| Onderdeel | Afbeelding (download link) | Datum |
|---|---|---|
| Frame | 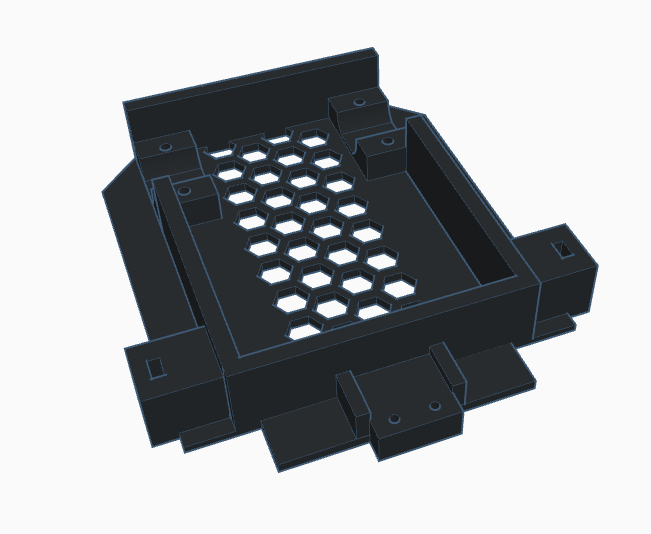 | Maart 2018 |
| Wielen (2 sets nodig) |  | Maart 2018 |
| Motorbeugels | 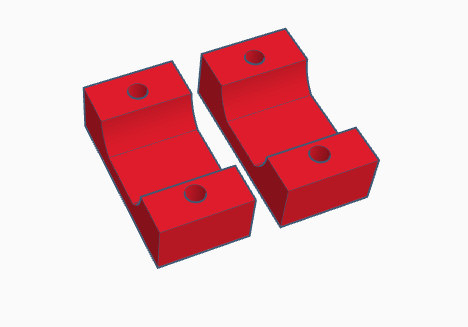 | Maart 2018 |
| Bumpers | 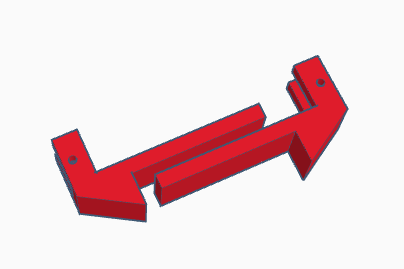 | Maart 2018 |
| sensorhouder | 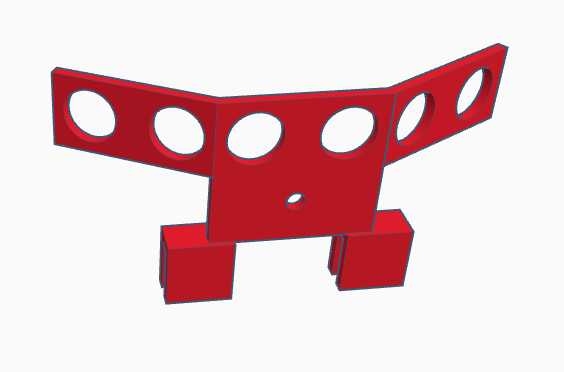 | Maart 2018 |
| Arduinohouder | 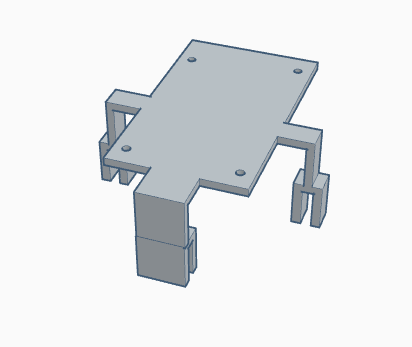 | Maart 2018 |
Het Onderstel
In de eerste video ontwerp en bouw ik het onderstelDe robot krijgt sensoren
In de tweede video monteer ik de sensorenArduino Sketch
Hier is de arduino sketch (uit de tweede video!) voor de Arduino Mega 2560
De derde video
De vierde video
Hier is de arduino sketch (uit de vijfde video!) voor het basis station
Hier is de sketch voor de robot uit de vijfde video:
Code om de sensors te testen
Hier is de sketch uit de 5e video voor de robot met een extra test functie voor de sensors.
Bij het opstarten van de robot worden eerst de sensors getest, het resultaat wordt naar de serial monitor gestuurd, de baud rate is 9600